本文介绍了网络流中最大流求解算法中的ISAP算法,包括算法过程、算法正确性等
BB
这个学期在做算法实验的时候,顺便回顾了一下ISAP算法,然后发现网上的理解其实不太对,故写此文
应该会有许多不严谨的地方 _(:з)∠)_
Reference
- https://www.cnblogs.com/nervendnig/p/8927773.html
- Ahuja, R. K., Mehlhorn, K., Orlin, J., & Tarjan, R. E. (1990). Faster algorithms for the shortest path problem. Journal of the ACM (JACM), 37(2), 213-223.
Introduction
网络流求最大流的最经典方法当属Ford-Fulkerson算法,其是增广路算法,思路简单实现容易,但是时间复杂度为O(f*M),与最大流有关。后来人们发现,当沿最短路增广时,时间复杂度与最大流无关,这就是最短路径增广算法(Shortest Path Augmenting Algorithm,简称SAP)。SAP算法是一类算法,包括了Edmonds-Karp算法(EK算法)、Dinic算法、Improved Shortest Augmenting Path算法(ISAP算法)。其中EK算法的时间复杂度为O(NM^2),Dinic与ISAP算法的时间复杂度为O(MN^2)。虽然Dinic与ISAP算法时间复杂度相同,但是ISAP算法常数更小,效率更高。
Definition
在介绍算法实现前,首先引入一些定义。
- 距离函数(distance function)
d(u):一个函数。称距离函数合法(validity)当其在残余网络(redisual network)中满足d(t)=0, d(u)<=d(v)+1 for each arc(u, v)。 - 允许弧(admissible arc)
arc(u, v):在残余网络中满足d(u) = d(v) + 1的弧arc(u, v)。
Implentation
下面介绍算法的实现过程。
- 初始化:令当前点
u为s,即u=t。转2。 - 反向BFS:进行反向BFS,即从汇点
t出发,令d(t)=0,后进行BFS,令d(u)=d(v)+1,进行下一步。(此步可以不进行,直接进行下一步。) - 判断是否满足
d(u) >= n:若d(u) >= n,则此时求得的流量为最大流,结束算法。 - 判断是否是汇点
t: 对当前点u判断是否为汇点t,是则进行增广,转8,执行 AUGMENT操作。 - 判断允许弧是否存在:对当前点
u扫描邻接边,若arc(u, v)为允许弧,则转6,执行 ADVANCE操作;否则,转7,执行 RETREAT操作。 - ADVANCE操作:此时找到的允许弧为
arc(u, v),则令u=v, pre(v)=u,此处的pre是记录v的前驱节点。转3。 - RETREAT操作:此时找不到允许弧,则令
d(u) = min { d(v) + 1, arc(u, v) \in Ef },即令d(u)为在残余网络中u的邻接边(u, v)中d(v)的最小值+1,称这一操作为 重标号操作(relabel)。后令u=pre(u),转3。 - AUGMENT操作:沿前驱节点找到到达汇点
t的路径,然后沿这条路径增广,累加流量。后令u=s,转5。
static int prev[N]; //前驱节点
static int preEdge[N]; //前驱边
static int d[N]; //距离函数
inline int ISAP(int src, int des, int n) {
//初始化部分
memset(d, 0, sizeof(d));
prev[src] = src;
int u = src;
int ans = 0;
//判断是否满足d[u] >= n,满足则结束算法
while(d[u] < n) {
// 判断是否达到汇点t
if(u == des) {
// AUGMENT操作,增广后回到源点s,累加答案
int aug = inf, v;
for(u = prev[des], v = des; v != src; v = u, u = prev[u]) {
aug = min(aug, e[preEdge[v]].w);
}
for(u = prev[des], v = des; v != src; v = u, u = prev[u]) {
e[preEdge[v]].w -= aug;
e[preEdge[v]^1].w += aug;
}
ans += aug;
}
// 判断允许弧是否存在,存在则执行ADVANCE操作
bool canAdvance = false;
for(int i = head[u]; ~i; i = e[i].nxt) {
int v = e[i].v;
if(e[i].w && d[u] == d[v] + 1) {
prev[v] = u;
preEdge[v] = i;
u = v;
canAdvance = true;
break;
}
}
//不存在则进行 RETREAT操作
if(!canAdvance) {
int mind = n;
for(int i = head[u]; ~i; i = e[i].nxt){
if(e[i].w) {
mind = min(mind, d[e[i].v]);
}
}
d[u] = mind + 1;
u = prev[u];
}
}
return ans;
}
Correction
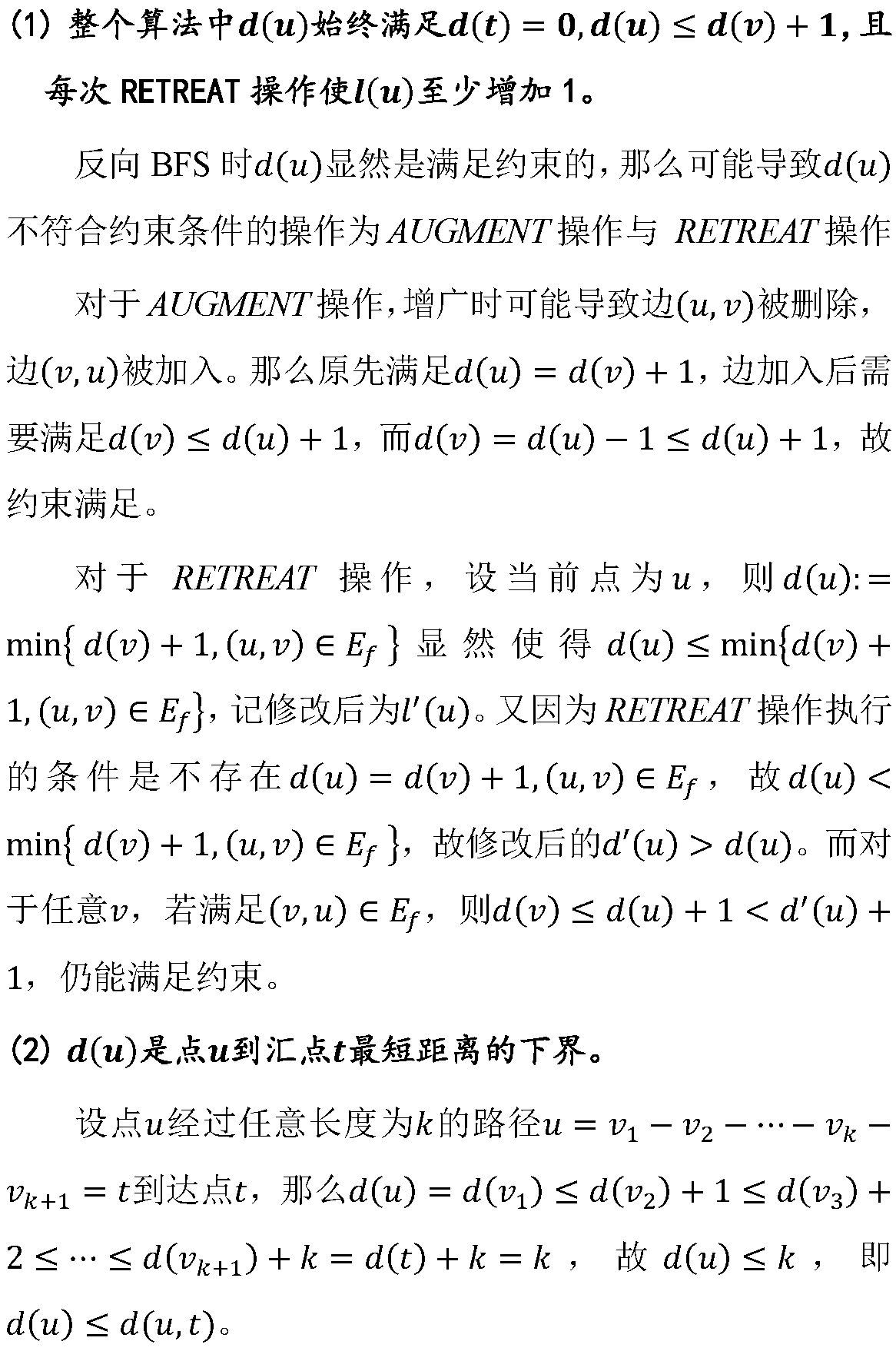
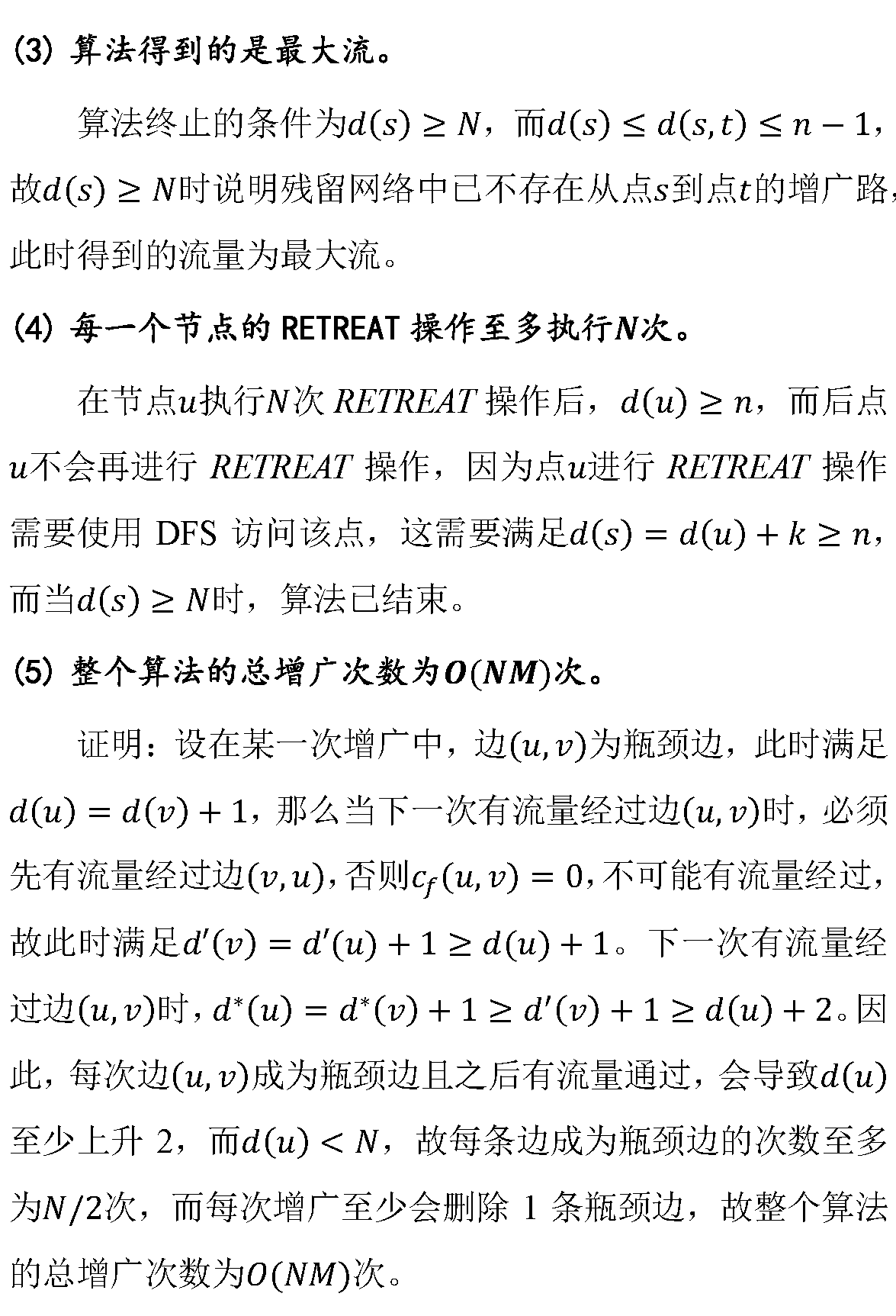
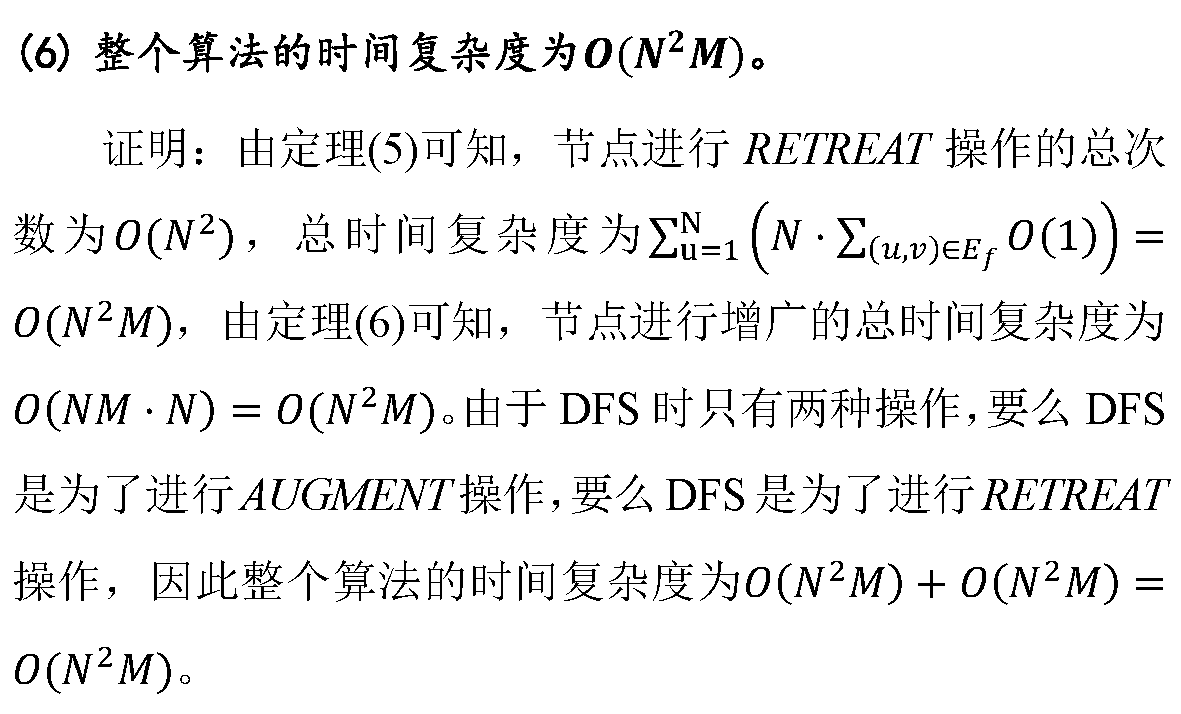
对于上述定理,有如下定理或性质。由于公式较多,这部分采用贴图呈现。
综上,算法的正确性与时间复杂度正确性等得以证明。
Optimization
实践证明,上述算法其实还是比较慢的。发明者还提出了 GAP优化。
GAP优化是指使用数组gap维护gap[d(u)],然后中间有一处gap[i]==0,那么无解,此时取得的流量为最大流。换句话说,在进行RETREAT操作时,若当前d(u)是整个图中唯一的一个,则可以提前结束算法,此时得到的流量为最大流。可以通过构造切割,证明其违反了d(u) <= d(v) + 1证明。